KAUST researchers propose a distributed coordination framework for heterogeneous non-terrestrial networks
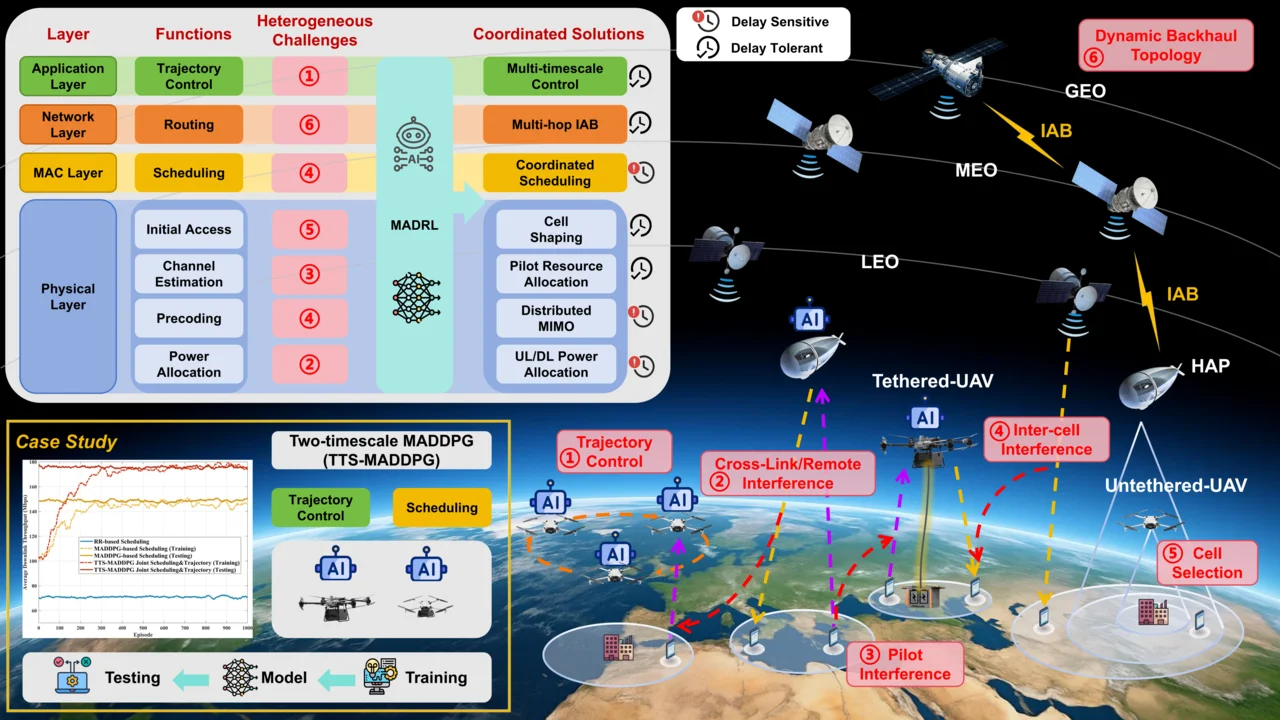
First analyzed the unique characteristics of non-terrestrial networks (NTN) platforms with impact on network specification, and proposed an efficient distributed coordination framework for heterogeneous NTN, verified by a case study on IAB-enabled heterogeneous UAV networks.
About
Jikang Deng, Dr. Hui Zhou, and Prof. Mohamed-Slim Alouini, have proposed a distributed coordination framework for heterogeneous non-terrestrial networks (NTNs). Their work, detailed in a newly published paper in IEEE Communications Magazine, systematically addresses the challenges in each individual layer through multi-agent deep reinforcement learning (MADRL)-based coordinated solutions. Interestingly, this work has also been highlighted in the September 2025 issue of IEEE Spectrum, as shown in https://spectrum.ieee.org/6g-wireless.
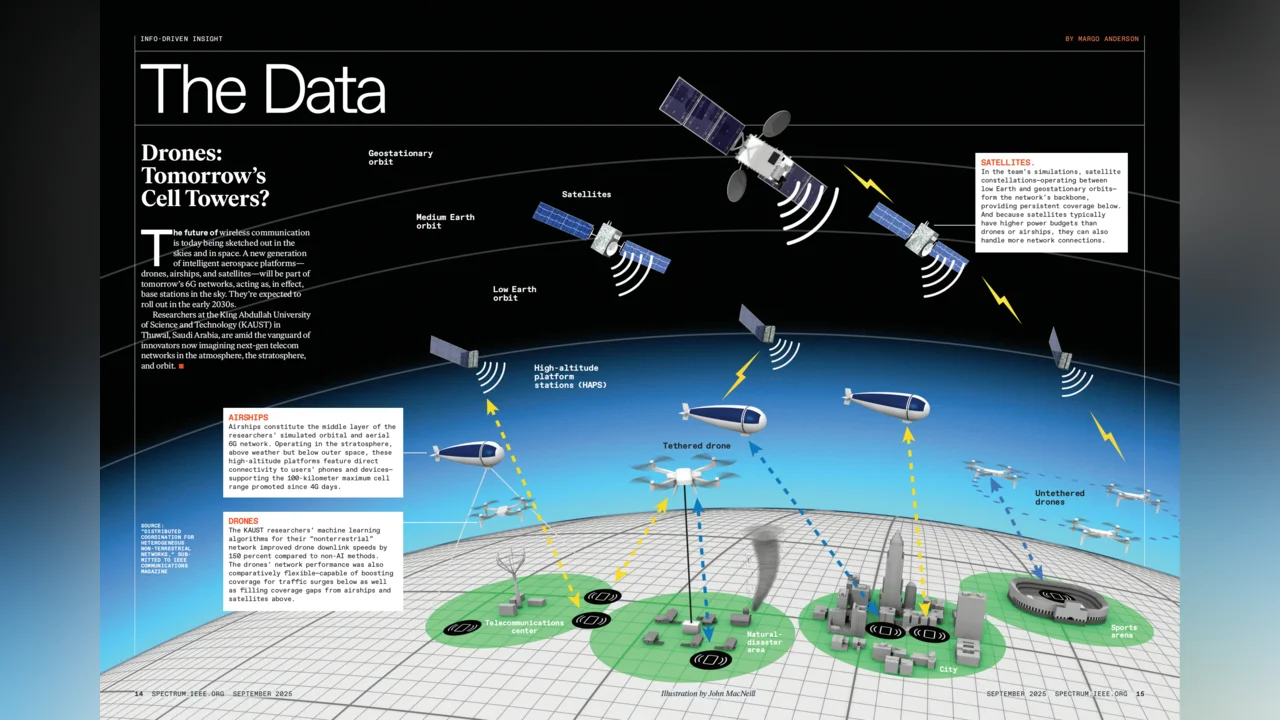
NTN extends coverage and resilience when terrestrial infrastructure is unavailable, supporting connectivity in post-disaster and remote regions. The current NTN typically consists of uncrewed aerial vehicles (UAVs), high-altitude platforms (HAPs), and satellites, which differ significantly in power supply, loading capability, etc. These various characteristics impact their implementation and further complicate the coordination among heterogeneous NTN platforms to tackle the communication challenges. However, the centralized coordination framework in the terrestrial network shows limitations in tackling the highly dynamic NTN scenario.
“Unlike terrestrial networks with fixed infrastructure, NTNs are highly dynamic and heterogeneous,” said Jikang. “Our framework employs the MADRL algorithm to effectively facilitate the distributed coordinated solutions and solve the heterogeneous challenges.”
For the heterogeneous NTN scenario, this research provides a comprehensive analysis on the feasibility of the coordination framework based on distributed learning. The key contributions include:
- Identifying the unique characteristics of different NTN platforms, and their impact on the design and implementation of NTN.
- Providing an in-depth analysis of communication challenges and potential coordinated solutions across the physical, MAC, network, and application layers in heterogeneous NTNs.
- Investigating emerging MADRL algorithms to empower coordinated solutions, categorized into delay-tolerant and delay-sensitive solutions.
Furthermore, they have also conducted a case study of joint user scheduling and trajectory control optimization problems in the heterogeneous UAV-based scenario, where the proposed optimization framework, including tethered UAVs and untethered UAVs, can be fast deployed to support emergency communications in disaster areas and industrial applications as pipeline inspections.
“Non-terrestrial networks are essential to connect the unconnected and to secure communications in times of crisis,” said Prof. Mohamed-Slim Alouini. “This work shows a path from concepts to deployable coordination schemes considering the practical constraints as Size Weight and Power (SWaP) limitation in NTN, which underlines the importance of achieving efficient distributed coordination in heterogeneous NTN to fully exploit the advantages of various NTN platforms.”
This work demonstrates the great potential of applying MADRL to facilitate coordination in heterogeneous NTNs, and also outlines promising research directions in future large-scale NTN scenarios. The authors believe this work establishes a foundation for future research in this area.
More details about this work can be found in the following published paper:
Jikang Deng, Hui Zhou, Mohamed-Slim Alouini, “Distributed Coordination for Heterogeneous Non-Terrestrial Networks”, IEEE Communications Magazine, 2025.
Avaialable online: https://arxiv.org/pdf/2502.17366
Related People

Jikang Deng
- Ph.D. Student, Electrical and Computer Engineering

Mohamed-Slim Alouini
- Al-Khawarzmi Distinguished Professor, Electrical and Computer Engineering